

研究室概要
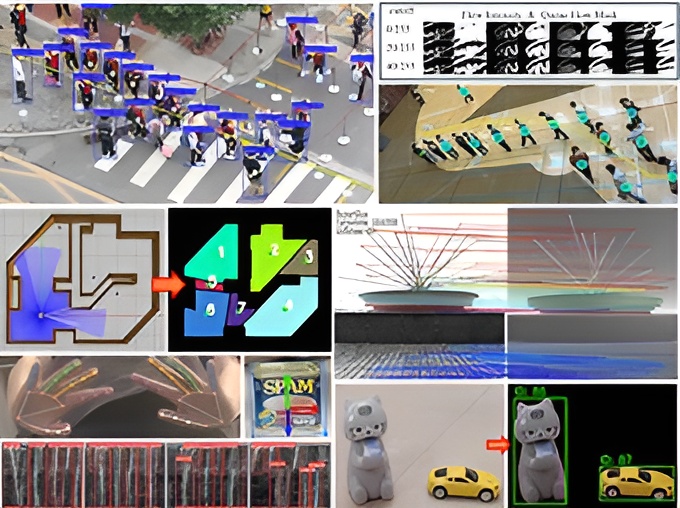
映像を解析・処理することで、ロボットが現実世界を理解し、人と共存する。そんなワクワクするような未来を目指して研究しています。
人間が物を見たとき、詳細を完全に覚えているわけではなく、色や形、大きさ、用途などの特徴を無意識に認識しています。このように物事を抽象的にとらえるという認識プロセスをロボットに応用することで、より効率的な処理が可能になると考えています。
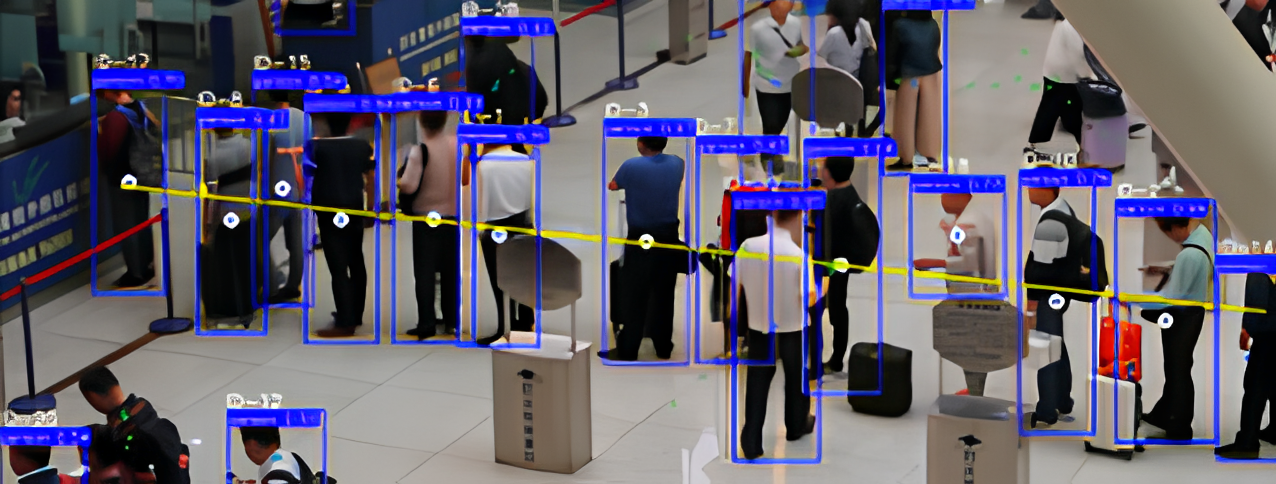
現在、私たちは、サービス利用者数を自動計測する技術やナビゲーション用の環境マップを拡張する研究、そして実世界の物体を3Dオブジェクト化する研究を進めています。また、ロボットエンジニアに必要な技術を習得できるよう、ロボットの制御や通信、機械学習、ロボットビジョン、Spatial AIなどにも積極的に取り組んでいます。


研究内容
映像解析・処理でロボットが現実を理解し、人間の抽象認識を応用して効率的な情報処理を実現。サービス利用者計測、環境マップ拡張、3Dオブジェクト生成など先端技術の研究とロボットエンジニア育成に取り組んでいます.
活動ニュース
- 2025年1月23日 熊谷海斗さんが人工生命とロボティクスに関する国際シンポジウムAROB(大分)で発表しました。
- 2025年1月22日 川音クライブジャンセンが人工生命とロボティクスに関する国際シンポジウムAROB(大分)で発表しました。
- 2024年10月9日 松田 賢治さんがFourteenth International Conference on Swarm Intelligence(ドイツ)で発表しました。
- 2024年10月5日 飛澤真大さんがマルチエージェント・マルチロボットプランニング研究会で発表しました。
- 2024年9月18日 星野順哉さんがSWARM 2024 in September: The 8th International Symposium on Swarm Behavior and Bio-Inspired Robotics(京都)で発表しました。
- 2024年9月18日 松田 賢治さんがThe 8th International Symposium on Swarm Behavior and Bio-Inspired Robotics(京都)で発表しまし。
- 2024年6月20日 鈴木天太さんの論文がJournal of Robotics and Mechatronicsに掲載されました。
- 2024年5月18日 クダイベルガノワ・ティムルさんと沖浦慶彦さんが日本分析化学会分析化学討論会(京都)で発表しました
お問い合わせ・ご相談
ロボットビジョン・Spatial AI(松岡)研究室へのご質問やご意見は、以下をご確認のうえ、お問い合わせください.
学外の方
企業の方、報道関係の方、その他学外からのご質問・ご意見は、東京工科大学の代表お問い合わせ窓口よりご連絡ください。
学内の方
研究室見学をご希望の方、または研究内容についてご質問のある方は、以下のGoogleフォームよりお問い合わせください。
